Introduction to RobotML¶
RobotML covers many things. In order to understand its underlying logic it is necessary to understand what are its different parts. RobotML is in fact composed of three main parts and some associated tools. These parts are:
- A modelling platform based upon Papyrus that allows to represent Robotics systems and associated environments ;
- Generators based upon Acceleo and allowing to deploy the models composed thanks to the above part towards a list of targets;
- Associated tools that allow the user to compile and execute the code generated thanks to the generators above. There are two types of targets:
- Robotic middleware targets: This type of targets allow the robotician to ignore the details of sensors and actuators focussing on the processing of information (such as decision taking).
- Environment simulators: this type of targets allow the robotician tp ake the robot(s) live somewhere, presents information to the sensors and exhibit the consequence of decision taken onto the “real” world.
- A Community portal called RIM portal (RIM means Robot Independant Model) where the Robotic community can share models and the like allowing the interactions to occur.
Interactions between RobotML parts¶
The different parts presented above are interacting one with another in order to answer the needs as already presented (see RobotML Documentation). These interactions have to be understood in order to apprehend the RobotML environment as a whole. The following figure presents the parts and their possible interactions.
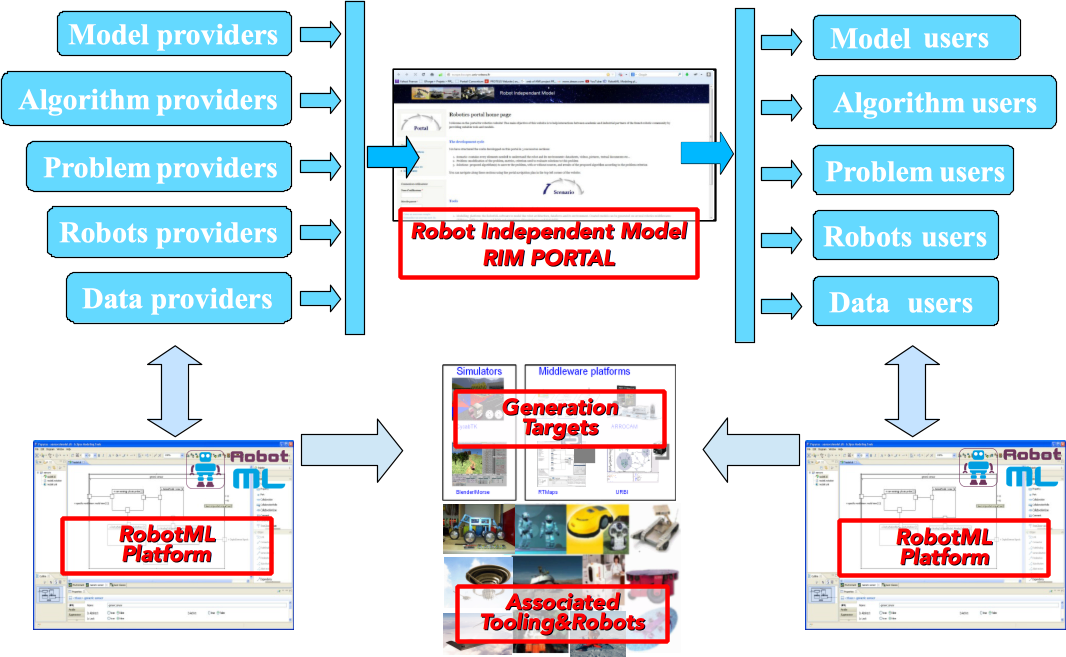
PROTEUS Rationale
The sections that follow are detailing this schematic explaining how the interactions occur and what kind of interactions exists. This is what we called the The Life Cycle section details how the interactions are embodied in real life and the RobotML explains how the different developed tools and parts instantiate this life cycle.
Note
It is of more importance to read the description of the Life cycle and the following pages.
RobotML Quickstart¶
In this section, we’ll show you some steps in order to let you